
The autonomous robot platform is making progress.
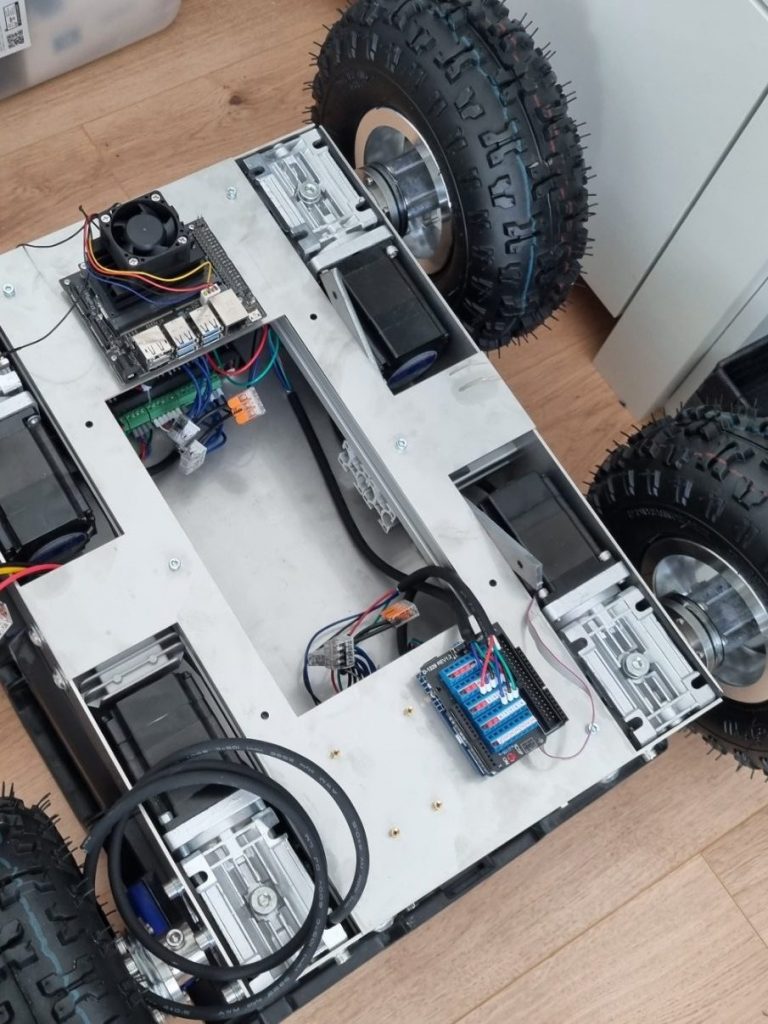
The hardware design of the first prototype for the robot’s basic platform has been finalised. There were some setbacks regarding the design of the motors and gears. The four drive motors (closed loop stepper motors) were too weakly dimensioned. However, this was not a problem for initial tests without ground contact. The setup of the communication between Nvidia Jetson Nano and Arduino for the transmission of motion commands was completed as a first test. A programm written in Python receives commands from a PS4 controller to communicate with the Arduino via the serial interface.
The next steps are as follows: change the power supply from 24V to 48V, as the motors reach their specified torque at 48V. Conversion to more powerful motors and a different gear ratio. Configuration and installation of ROS2 on the Nvidia Jetson. Setting up the Intelrealsense RGBD camera.

Schreibe einen Kommentar